Impressum
Jimdo GmbH
Stresemannstr. 375
22761 Hamburg
Germany
Achtung: Kein telefonischer Kundenservice! Einfach dem Jimdo-Team eine Nachricht senden.
Tel.: +49 40 - 8 22 44 997
Fax: +49 40 - 8 22 44 998
Vertretungsberechtigte Geschäftsführer:
Fridtjof Detzner, Matthias Henze, Christian Springub
Registergericht: Amtsgericht Hamburg
HRB 101417
Ust. IdNr.: DE814864138
Allgemeine Geschäftsbedingungen
このホームページはジンドゥーで作成されました

ジンドゥーなら誰でも簡単にホームページを作成できます。レイアウトを選んだら、あとはクリック&タイプでコンテンツを追加するだけ。しかも無料!
ジンドゥー(www.jimdo.com/jp/)であなただけのホームページを作成してください。


基準局 東へのコース 西へのコース
500m近辺で少しカーブ(5度ぐらい)しているので完全な直線ではなく、
松林が電波の障害になっています。
それでも1346.8mは無線電波が届きました。(^^/

思う
写真では晴天で清々しいのですが、西風が強烈で自転車での実験は
とーってもしんどかったです。風は写真に写らないんです。
津波対策として堤防の工事が何年も続いています。
川があるので全てを堤防で囲う事は出来ません。
波は回折すると思うし、、、どうなんでしょう。
この堤防の有無によるシミュレーション結果を見てみたいなあ。
2020/01/12 NTRIP client
高精度測位都市に住んでいます。
善意の補正データ配信があるのだから絶対値の座標を測位出来るようにしました。

携帯電話のデザリングにてタブレットPCをNtrip severへ接続して
SU_RTCM3 HTTP/1.0をゲットし、F9Pが受け付ける補正データだけを使用しています。
また、基準局の座標RTCM1005を作っています。

この方法で1度だけ基準局のアンテナ位置を測位すれば、以降はデザリング不要で
移動局が精度×2倍で測位可能です。(基準局が精度×1倍ですので)

思う
市内の中学校毎に基準局を設置して欲しいなあ。
ローコストのZED-F9Pを使えば、すっごく安い物が出来ます。
とっても有益な物です。市長さん、お願いします。
2020/01/18 RTKの座標
RTKっていうかGPSで測位した座標は3次元なんです。
宇宙にある4個以上の衛星から飛んでくる電波の交わった点を計算しています。
交わった点を計算する時の誤差は水平方向に比べて垂直方向は1.5倍から2倍ぐらい悪くなります。

2020/01/27 3馬力 プロジェクト その12
自動運転をどうするか。。。
パソコンの設定画面もあるし。。。
面倒だなあ。
ってことで、Pixhawk PX4 を使ってarduRoverさせることにしました。

ソフトを移植しようと思ったんだけど、クラスが細かく分かれていて
何が必要なのかが分かりづらかったので断念しました。
そのかわり、Pixhawk PX4へ接続する部分をFPGAで作ります。
思う
C国が春節に入ってしまったので、注文した基板が遅くなりそうです。
ウィルスの件もあるし、大丈夫かなあ。加油。
そういえば、今年も梅の花が咲いていました。
年年歳歳です。
2020/02/01 3馬力 プロジェクト その13

Pixhawk PX4 と BLDCモータドライブ基板とを接続するための基板です。
Pixhawk PX4 はラジコンサーボ用の制御信号をPWMで出力しますが、
BLDCモータのPWMとは周波数が違うので変換する回路が必要になります。
また、3相のホールセンサの信号を合成してフィルタをかけて Pixhawk PX4 へ入力します。
いつものFPGAの10M08SCE144を使っています。
思う
もう1枚と合わせて3枚の基板を注文してあります。
春節が終わってもしばらくは基板の製造が進まなそうです。
C国に何かあると日本も大きな影響を受けます。
早く収束する事を願っています。
2020/02/03 3馬力 プロジェクト その14 pixHawkIF


Info: (nios2app.elf) 21 KBytes program size (code + initialized data).
Info: 1140 Bytes free for stack + heap.
10M08SCEのRAMでは直ぐにプログラムがギリになってしまいます。
2020/02/08 3馬力 プロジェクト その15 DC Motor Serovo
DCモータのアクチュエータを位置制御したくて基板を起こします。

可変抵抗によるアナログ電圧をフィードバック制御します。
エンコーダ信号も入力可能にしました。
ストローク40mmだから12ビットのADCでも分解能0.01mmなので十分です。
また、10mm/秒と移動速度が遅いので制御周期も遅くて十分です。
かえって指令値をゆっくりとスイープしないといけません。
思う
これで4種類の基板をC国に注文しています。
納期を急ぐわけではないので、気長に待ちます。
マスクを送る援助も良いことです。
自分は、終息後に仕事があるように基板を発注する事も援助だと思います。
2020/02/14 3馬力 プロジェクト その16 rover2020
基板が来ないのでボディを妄想中です。

アクチュエータはボディ中央をくの字に曲げるため使います。
ミューの高い路面でもある程度旋回が可能なようにしたいので部品点数を増やしました。
宅配シリーズで各社から出品されているのって本当に曲がれるの?って思います。
Hinjyaのroverは荷物を運ぶことが目的じゃないので、後部にバッテリ、全部に何かを載せます。
思う
C国での生産が止まってしまい日本の大企業が困っています。
小市民のHinjyaも困っています。
ドラッグストアへ行ってもマスクが売り切れです。
必要な人に必要なモノが届くことを願ってます。
2020/02/22 FUSION PCB 復活
FUSION PCB 様が復活しました。
大変嬉しいことです。
終わらない夜は無いのです。
これからも末永くお付き合いをしたいです。
昨日のニュースで「自律走行ロボット」が紹介されていました。
http://www.somic.co.jp/effort/rehabilitation/
安そうで、実用性もありそうです。
してみた~い
ZED-F9PのRAWから25HzでRTKLIBのmoving baseしてみた~い。
NanoPi NEO 512MB をクリックしました。
RTKLIBは論理を実装しているのでFIXした時には正しい座標を得る事が出来ます。
実用性がある装置にするのにはFloat時の座標をどうするかです。
2020/02/23 3馬力 プロジェクト その17 rover2020左へ曲がりますご注意下さい
よく、妄想族って言われます。

2020/02/26 Nano PI NEO2 その1
F9Pを2個使ってmoving baseするための基板です。
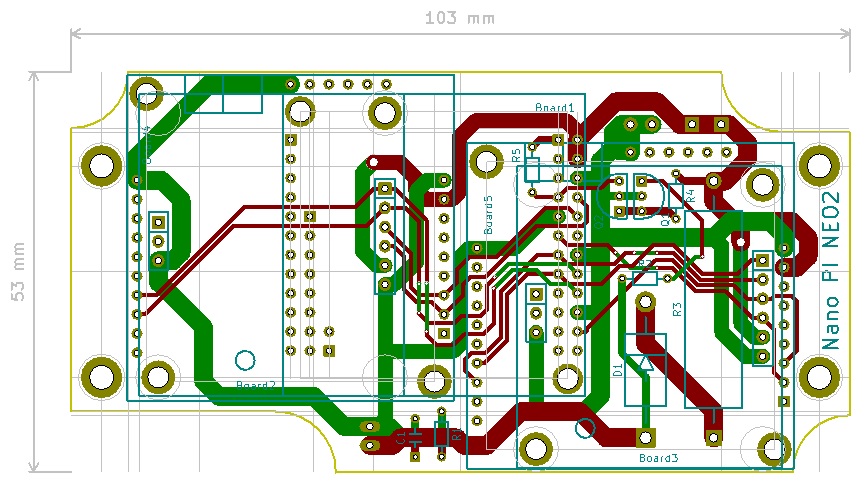
基板は市販のケースに合わせて作ります。
基板に合わせてケースを作ると高価になってしまいます。
NanoPI NEO2を基板裏面へスタックさせます。
また、二重電解コンデンサで電源ブチ切り対策をしています。
さすがにlambdaを25Hzで回せる組み込み用のマイクロコントローラは在りません。
2020/02/28 2.4GHzマルチホップ
2.4GHzでマルチホップするためのXBee基板です。
200m間隔の多点でデータを送受信します。
無線モジュールの末尾がJになっている技適品なので8dbmしか出力がありません。
また、microSDカード へデータの保存をします。
スペースが無いのでソケットを引き起こしてカードを抜き差しします。

Hinjyaも地球環境を心配して鉛フリーで半田付けしています。
1005Mサイズの半田付けを行うのには高性能な半田ごてが必要です。
HakkoのFX951-51を使っています。
すっごく調子良いですよ。
2020/03/03 3馬力 プロジェクト その16 DC Motor Servo
基板が続々とやって来ます。

1005Mってのは1.0mm×0.5mmのサイズになります。
0.5mmのシャープペンシルの芯を1mmに切ったのを半分に薪割りした小さなものの両端に電極があります。
そこを半田付けしています。
鉛フリーは鉛入りに比べて半田付けが難しいです。
融点が高いので、いきなり溶けて直ぐに固まります。
こて先に少量取るってのが難しいです。
2020/03/08 スタンダード
トラ技の3月号で世界スタンダードのSTM32Fが特集されていました。
みんなが使うと数が出るので安くなるので更に使うようになるとスタンダードになります。
初めに安くするには自前でコアを作らずに買うってのも方法です。
使う側からするとOSレスならHALがあればUSBやLANが簡単に使えるし
C言語ならコアなんて関係ないし
開発環境のIDEが無償で制限なく
ペリフェラルも同じ様なのが入ってるし
安ければ良いんです。

2020/03/12 ラズパイでのデバック環境
コマンドラインでのコンパイルではデバッグが出来ません。
CUIでもGUIでも良いのでブレークポイントを設定して変数の値を調べることが必要なデバッグ環境です。

自分はWindowsのパソコンのeclipseでクロスコンパイルしています。
デバッグ対象となるラズパイ系の基板とは有線/無線のネットワークで接続しています。
ラズパイ系の基板ではgdbserverが起動することになります。
手順
1)ラズパイ系の基板へOSをインストールする。
2)ラズパイ系の基板でapt-get updateする。
3)ラズパイ系の基板にapt-get install gdbserverする。
4)ラズパイ系の基板にworkフォルダを作成する。
5)Windowsのパソコンにjavaをインストールする。
6)Windowsのパソコンeclipseをインストールする。
7)ラズパイ用のtoolchainをインストールする。
8)eclipseにMobile and Device Developmentを選択してtoolchainをインストールする。
9)eclipseで新規プロジェクトを作成する時に
Cross compiler prefix:arm-linux-gnueabihf-
Cross compiler pathにtoolchainのbinフォルダを指定する。
10)eclipseでビルド
11)eclipseのDebug ConfigurationsでC/C++ Remote Applicationを選択する。
12)connectionのHostにSSHでのラズパイ系の基板のIPアドレスとログイン名,パスワードを設定する。
13)Remote Absolute File Pathにラズパイ系の基板のworkフォルダを指定する。
14)Commands to excute befor applicationでchmodでデバックするファイルのパーミッションを変更する。
15)DebuggerタブのGDB debuggerにarm-linux-gnueabihf-gdbを設定する。
16)debugボタンをクリックするとデバッグが出来る。
2020/03/13 eclipse 3連荘
NIOSⅡのソフトを作るのにもeclipseを使っています。
思えば初めてeclipseに触れたのはNIOSⅡでした。
eclipseはインストールが不要でフォルダのコピーが基本ですので
CPUに合わせて複数を使っています。
んが、ルネサスではCS+で頑張っています。

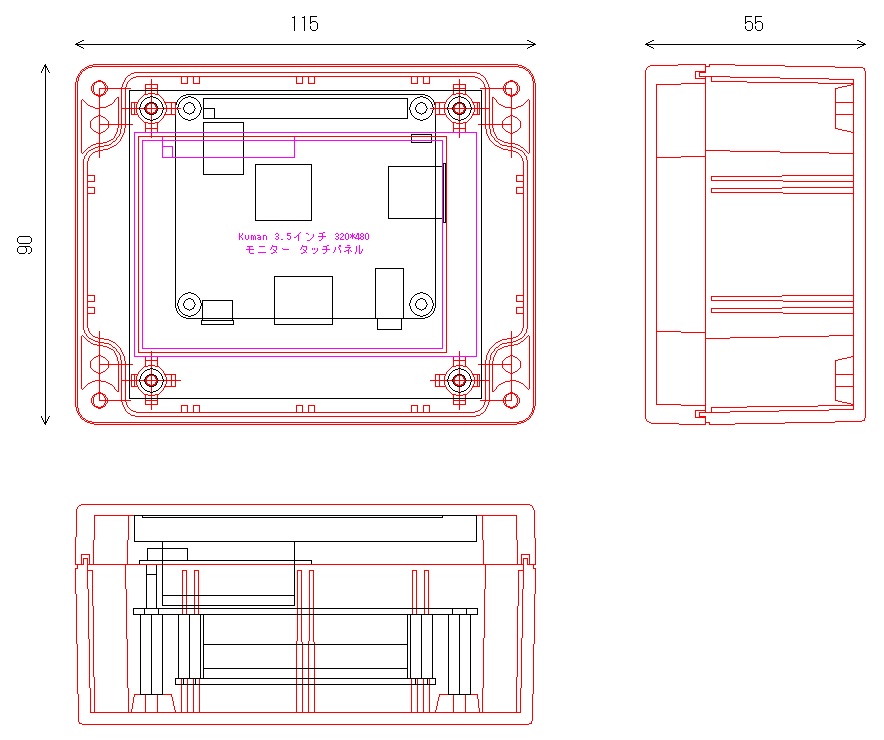
2020/03/19 ラズパイ 3.5インチLCD
タッチパネル付き320×480です。
残念なことにDSI(Display Serial Interface) ではなくSPI接続になっています。
結局のところNanoPI NEO2は止めてラズパイ3のModelA+にしました。
ラズパイはUARTが1つしかないので、2つのF9PをMCUにてマルチプレクスさせます。
デジカメなのでモアレが出てますが、実際はもっと綺麗です。

2020/03/20 ラズパイとZED-F9P
ラズパイ3A+とSparkFun社のGPS-RTK2等を2枚載せて3.5インチのLCDをスタックする基板です。
と、それを入れるケースです。

2020/03/21 Cylinder of Hinjya 貧者のシリンダ
Stroke:50mm
Max Load/Dynamic:150N
Speed/Max Load:36.5mm/sec
Speed/No Load :43.9mm/sec

応答性っていうか動作速度です。
無負荷での実測値です。

2020/03/23 pixHawkIF基板
2月の頭に注文した基板がやっと入荷しました。
何故かこの1枚だけが迷子になっていました。

基板注文時はpxHawkからのPWM信号を入力しようと思っていましたが、S.BUS信号を入力することに変更しました。
arduroverはskid steerではなく普通の前輪操舵、後輪駆動で出力して、この基板で処理します。
2020/03/26 S-BUS信号のデコード
S-BUS信号にはチェックサムが有りません。各バイトデータのパリティチェックのみです。
無線データにしてはちょっとです。
先頭の0x0fと25バイト目の0x00で同期させます。
16CHは11ビットのデータ(0~2047)で、17CHと18CHは1ビットです。
6chのプロポですので6chまでしかデータが変化しません。
2020/03/28 2.4GHzマルチホップ その2
Digi XBee3モジュールはXCTUソフトウェアツールで設定します。
ファームウェアをDigiMeshに書き換えてメッシュを組めるようにしています。
UART InterfaceのAPI Enableを1か2にしないとNetwork working mode の表示が出来ません。

2020/03/29 ラズパイのwiringPi
ラズパイのプログラムをC言語で作る時に入出力ピンの制御をしてくれるライブラリがwiringPiです。
windowsパソコンのeclipseから見るとラズパイも1つのマイコンをデバッグしているのと同じです。
ラズパイがarmってマイコンで、パソコン上でソースコードの編集とコンパイルして、ラズパイへ転送してデバッグするスタイルです。
ラズパイは電源を入れただけで何も触りません。
入出力端子の信号を調べるためにオシロスコープで信号を調べました。
windowsパソコンでクロス・コンパイルするので、ラズパイでコンパイルしたwiringPiのオブジェクトファイルをwindowsパソコンへ
コピーしておかないといけません。そのフォルダをeclipseのリンクライブラリに登録します。

2020/03/31 Moving Base ZED-F9P×2
ubuntuっていうかLinuxのOSの描画がどうなっているのか不明です。
テキスト表示や線の描画をOSのAPIをコールして出来ると思うのですが。
仕方が無いのでopen(DEV_FB, O_RDWR)して一定周期でファイルに書き込んでいます。
ソフトでメモリのコピーをするとすっごく遅くなります。
480×320の画面でも1秒ぐらいかかります。
数値の表示部分もbmpファイルをコピーしています。
どうしてもダメだったらGTK+かQtを使います。

電源スイッチはA月電子にあった防水でない照光式で、5Vでも明るいです。

2020/04/02 Moving Base ZED-F9P×2 その2
ラズパイ3A+とSparkFun社のGPS-RTK2等を2枚載せる基板がきましたので実装しました。
ZED-F9Pの基板は2種類に対応しています。
FUSION PCBへ3月20日に注文して4月2日に手元に届きました。
基板サイズは77×88mmで、基板代$52.9とDHLの送料込み5枚で$72.51になりました。
FRー4の4層で鉛フリーレベラーの基板です。
この基板の上に3.5インチ表示器を載せて、下にラズパイ3A+をスタックさせます。
マイコンで2つのシリアルをまとめています。

思う
今日、やっとマスクを入手しました。
1つだけ、ポツンと残っていたのです。
C国の方々からマスクを送ってもらっている市町村があります。
C国の方々の「義」を感じました。
学校がゴールデン・ウィークまで休みになるそうです。
子供達は毎日何をしているのでしょうか。
何か興味のあることを学ぶことが出来る時間があるんだからチャンスだと思う。
2020/04/07 Moving Base ZED-F9P×2 その3
思っていた以上に処理速度が遅いので困っています。
CH1:シングル測位演算時間 75ms
CH2:F9Pシリアル出力 RAWデータのRXM-RAWXに交じって衛星軌道情報のRXM-SFRBXが出力されています。

シングル測位の演算結果は正常です。

RTKの演算になると90msにも達します。
何かラズパイの設定が悪いのかなあ?
クワッドコアが全開で動いていないのかなあ?
ラズパイのCPU周波数は1.4GHzになっています。
gccでコンパイルした時に4コアが使われるのか不明です。
思う
今日、7都道府県に緊急事態宣言が発令されました。
自分は地方に住んでいるので、まだ影響が少ないのですが都会では疎開が始まっているようですね。
都会の人口密度では人に会わないようにするのは難しいと思う。
あの満員電車で密着している状態は田舎人の自分には信じられません。
人も含めて動物にはパーソナルスペースってのが在ります。
他人と狭い空間に一緒にいると苦痛です。
2020/04/16 安いPIC
ここんとこ安いPICで遊んでいます。
100円以下です。
でも付いてるものは全部付いています。
軽自動車の様なヤツです。
学校の教材に良いんじゃないかと思います。
英文のデータシートを眺めながら、算数と理科の勉強になります。
プログラムはソースコードって呼ばれるようにコードなのです。
画面を作る部分はグラフィックにペタペタしますが、命令は文字を打ちこまなくてはなりません。
思う
ついに全国的に緊急事態になってしまいました。
首相が給付金を出すと言ってました。
HinjyaのRoverを作る軍資金にします。
今日、長年一緒に過ごした愛用の自転車のメインフレームが折れてしまいました。
いっぱい色んなトコに行った思い出があります。
パーツ取りにして新しい自転車へ部品を移植します。
2020/04/16 安いPIC その2
安いPICと安い加速度センサを組み合わせました。
実験はA月電子の物ですが、もっと安いLIS2DE12TRなら1個170円です。
安いPICのプログラムメモリサイズは3.5KBしかありません。
MCCを使うと直ぐにオーバーフローするのでソフトウェアにてUARTやI2Cを出力しています。

2020/04/30 安いPIC その3
安いPICの基板を起こしてみました。

LEDの自動点滅の様なものって、癒し系の1/fか仏壇に置く蝋燭っぽいのしかありません。
加速度センサを使って激しく振ると明るくなるのって楽しいかなって思いました。
スライドスイッチは電源用じゃなくって、お決まりの癒し系1/fとのモードの切り替えです。
単三電池を縦にセットする丸い管の電池ホルダがあればよかったんだけどなあ。
あと、LEDの光を横方向に拡散するシリコンカバーじゃないリフレクタも欲しかったです。
思う
都会と違って田舎はマスクするようになった以外さほど変わっていません。
自由に外出している人が大変多いです。
まあ都会が終わった後で地方に来るのは何でも流行りもののお決まりです。
医療が崩壊すると他の病気やケガの人が困ります。
イタリアみたくならないよう気を付けましょう。
2020/05/01 PIC32MMとLIN
LINってのは低コストな車載ネットワークの規格です。
簡単に説明すると19200bpsの送受信2本のシリアル信号を1本にまとめたものです。
電動ミラー,ドアロック,サンルーム,ヘッドライト等のボディ系に使われているらしいのですが、整備書で確認したわけじゃありません。
自動車には10~60個程度のECU(マイコン)が使われていて、ケーブルの重量が車体重量の5~10%と本に書いてありました。
低コストなLINに対応する低コストなマイコンとしてPIC32MMが良いんじゃないかと思いました。
60Vの電源に対応するDC/DCも載せています。
んっが、LINのトランシーバが40Vまでになっています。
EVの電装って何ボルトなのだろう??? 48Vって普及してるんかい。

思う
最近、背面パッドのデバイスが多いんだけどGNDに落として良いかしっかりデータシートに記載して欲しいっす。
2020/05/02 安いPIC その4 完成
PIC16LF15313は1個73円の安いマイコンですが、十分楽しめるヤツです。
以前は8ピンのマイコンなんて何に使うんだろうって思っていました。
色々遊んでいたらプログラムサイズが97%になってしまいました。
ソフトUARTで3軸の加速度値を出力する時には1部機能をコメント化するよう
マクロを入れています。

後から気付いたのですが、加速度センサのMMA8653はmicro:bitに載っていました。
やはりFNパッケージになっていないと手ハンダ出来ません。
パッケージサイドのちょっとした部分が無いと熱が伝わらないのでハンダ不良になってしまいます。
100個買えば132円まで安くなりまが、1個だと245円とみょーに1個の価格が高いです。

思う
ソフトとハードは一体なのです。
何かモノを作る時、最初に考えるのが何をソフトで行い、何をハードで行うかです。
既に売られているハードから使えそうなのを探して組み合わせます。
一方、ソフトは各自がゼロからオリジナルを作る事が出来ます。
この時にソフトを楽に作れるようハードを考えなくてはいけません。
最近日本で始めたプログラミング教育は何を目指しているのでしょうか。
2020/05/07 Cylinder of Hinjya 貧者のシリンダ
貧者のシリンダを位置制御してみました。
センサ位置20%と80%を往復させています。
非常に遅い動作なので、シリンダを移動させていって目標位置になったら停止するだけのコンパレータでも良かったかも。
でも、でも、貧者のシリンダはPI制御をしています。
少しオーバーシュートするセッティングになっています。
また、目標位置に0.1%足りない状態です。
目標位置はシリアル通信からのデジタル値です。
2020/05/11 安いPICでのサイン波
安いPICにはDACやDMAが入っていません。
staticな変数として0~180度を2.5度間隔のコサイン・テーブルで準備しておき、割込み毎にPWNの値を更新します。
なぜコサインなのかはステップからテーブルを計算する時に判断が楽(処理速度が速い)だからです。
テーブルの数は72+1個で1周期は144ステップになります。
73ステップ以上は(144-ステップ)のテーブルを出力します。

PWM出力のままではデジタルなのすが、ローパスフィルタを通すと綺麗なSIN波になります。

2020/05/19 PIC32MMとLIN その2
このPIC32MMのデータシートにはLIN/J2602と書いてありましたが
何か専用のハードウェアがあるわけじゃないので、普通にUARTで送受信しています。
データ長8ビット,パリティ無しです。

LINはマスタからbreak field,sync byte field,protected identifier fieldを送信すると
スレーブがデータを送ってくれます。
ただbreak fieldは13ビットなのでIOポートとしてソフトにて出力しています。

2020/05/20 安いPICでのサイン波 その2

安いPICでのサイン波は雨センサに使えます。
主な部品は安いPICとRail to Railのオペアンプです。
Rail to Railのオペアンプは0Vから電源電圧まで出力するオペアンプです。
あと出力保護用の部品が付いています。
雨センサの様な電極に直流電流を流し続けると電極が腐食します。
それを回避するために交流で駆動します。
水に濡れると出力の振幅が小さくなるので、安いPICのADCで入力して基準値より小さい時は
雨が降っていると判断します。
思う
最近、日本製の部品を使ってしまい後悔することがあります。
業界標準になっていないので他の海外メーカの部品に置き換わりません。
また、値段も高いし、納期が遅いことがあります。
日本製は少量多品種で頑張っていた時期があったので、ここに来て無理がたたったって感じです。
予告はあるけど突然製造中止とか悲しいです。
2020/05/21 安いPICで魚釣り その1
安いPICと加速度センサ、WiFiモジュールで魚のアタリがあった時に受信機へ信号を無線で送る基板です。
Bluetoothで携帯電話までだと距離が無いのでWiFiにしました。
魚釣りをする人は本当は気の短い人が多いって聞いた事があります。
自分は魚のアタリがあるまでその場で待っている事が耐えられません。
他の事をしていて、アタリがあったら走って行って巻き上げれば良しです。
本当は直ぐにアワセをしないと針を飲み込まれてしまいますが気にしません。

2020/05/22 安いPICで魚釣り その2
安いPICとWiFiモジュールで魚のアタリがあった時に受信してバイブレーション・モータを駆動する基板です。

2020/05/24 安いPICで魚釣り その3
子機と親機のケースはタカチ製です。
子機を防水ケースにしたかったんだけど基板のスペースが無いので断念しました。


ESP-WROOM-02には3つのWiFiモードがあります。
1)station:クライアントモード(子機)
2)softAP:アクセスポイントモード(親機)
3)station+softAP:クライアント&アクセスポイントモード
ポケットに入れる親機はアクセスポイントモードになります。
釣り竿の先に取り付けるセンサはクライアントモードです。
4本の釣り竿からのアタリ信号を1台の親機で受信します。
データの送信には2つのモードがあります。
1)TCP/IP ハンドシェークをして確実にデータを送る
2)UDP 一方的に送るだけなので受信できかた不明
今回はCR2032のコイン電池の消費電流を小さくするのでUDPにしました。
TCP/IPのハンドシェークを行うと電池を消耗するからです。
加速度センサ出力が設定値以上になった時にUDPで3回アタリ信号を送ります。
ESP-WROOM-02には消費電力を小さくする3つのモードがあります。
1)Modem-sleep 初期設定,15mA
2)Light-sleep 今回使用,1mA
3)Deep-sleep 消費電力が凄く小さいがwakeup時に設定を初めからやり直す
アタリが来るまではLight-sleepで待っています。
CR2032の公称容量は225mAhですので
そこそこ電池が持ちそうです。
2020/05/27 安いPICで魚釣り その4
やっぱり子機は海ポチャするので防水ケースにしました。
タカチ製です。
スマートキーを一回り大きくした感じです。
竿先に付けるには少し大きいですが何とかなります。
ケースに合わせて基板も作り直しました。


板厚1.0mmだと裏面電池ケース蓋のネジ用ボスに当たりますが
1.6mmにすると大丈夫です。
基板中央に3軸加速度センサ、その下にLEDとスイッチ。
ESP-WROOM-02に直接プログラムしても良いのですが、安いPICでシリアル制御しています。
消費電力の大きなESP-WROOM-02はハイサイド・スイッチで電源をオフにします。
また、ボタン電池を使い切るようDC/DCを載せています。
市販のケースに合わせて基板を作れば防水仕様になります。
さらに安くて見た目も良いです。
3Dプリンタは実用的でありません。
少量の試作のような場合は基板は海外で作るので安くなりますが、
ケースはどうしても国内なので高価です。
基板のガーバー・データの様に機械系もCAD/CAMがスムーズに行えるよう改善して欲しいです。
3軸の加速度センサを使ったこの無線ユニットを魚釣り以外に使えないかとネットで調べたら
人の転倒検出ぐらいでした。
2020/05/28 安いPICで魚釣り その5
子機を防水仕様にしたので親機もってことになりました。
4つの子機のどれからアタリ信号が来たか分かるようLEDを4個付けました。
また、受信確認したよスイッチも4個です。
親機は単4電池2本なのでESP-WROOM-02の電源を切りません。
Light-sleepのみです。


思う
都会での経済活動の復旧具合は飲み屋さんで判断されるようです。
地方のサプライヤチェーンのすそのでは仕事が9割減ったところもあります。
早く皆の分のワクチンが出来ますように。
2020/06/04 安いPICで魚釣り その6
子機のケースに欲が出ました。
高さ21mmなら普通に入るのですが、一回り小さな高さ15mmのケースに入れたくなりました。
2つとも上蓋は同じです。
高さ15mmの場合は上蓋に基板が取り付きます。
さらに電池が入る下蓋のボスが若干違います。
15mmのボスの方がわずかに高くなっています。
肉厚が厚いのです。
強度を考えると同じで良いはずなのにい。
15mmのケースに入れるには基板の板厚を1.0mmにしてボスをちょこっとだけ0.何mm削らなくてはなりません。
ここが市販ケースの泣き所です。

ESP-WROOM-02は電気をたくさん食べます。
32Dに比べたら少ないのですが。
起動時の電流が小さくならないのかなあ。
思う
banggoodを眺めています。
ワイヤレススイッチが安く売られています。
433MHzが多いようで、国による電波法の違いでしょうか。
東京で再アラートが出てしましました。
東京がしっかりしてくれないと地方に映画が配給されません。
4月公開予定だったあの映画はどうなってしまうのでしょうか。
2020/06/06 920MHz 多チャンネル
920MHzで送信できるデータってすっごく少ないんです。
1.5KB/秒ぐらいです。
しょうがないので3つのモジュールを使ったユニットを作ります。

いつものMCUで3つのモジュールの信号を1つにまとめています。
基板と部品は手配済みでソフトも作ってあります。
思う
続々とA国やC国から部材がやってきます。
大丈夫かなあ?
2020/06/06 安いPICで魚釣り その7
送信機のあたりトランスと受信機のあたりレシーブをセットでGet2YouAtari(げっちゅあたり)と命名しました。
加速度センサのスパンは8gですので竿の硬さに合わせて良い場所にセットしないとサチります。
X,Y,Zの3軸の加速度から合成した加速度であたりを判定します。
どんな感じになるかを実際に魚を釣って調べようと思い、あたりトランスからの加速度をタブレットパソコンの無線LANで受信して
グラフ化とデータ保存するプログラムを作っています。

思う
地方ではすっかりコロナ前に戻ってしまった人が多いです。
普通に「密」なっています。
地方で終息するかは県を超えて人が移動するかどうかです。
他県ナンバーの車を結構見かけます。
心配です。
2020/06/06 安いPICで魚釣り その8
プログラムが出来上がりました。
竿先の加速度を調べる場合にはアタリ・トランスをsoftAPにしてサーバーを起動して
タブレット・パソコンをクライアントにして接続します。
自分の持っている竿では加速度4gで大丈夫そうです。
UDPで25Hzで加速度を受信して表示しています。
また、データはファイルに保存して後から解析します。
ESP-WROOM-02の屋外での通信距離をざっくり調べてみました。
RF出力はMAXの設定にしました。
頑張って50m、無理して70mでした。
パターン・アンテナなんでこんなもんでしょ。

2020/06/10 920MHz 多チャンネル その2
データ・レートの遅い920MHzを3チャンネル束ねたユニットです。
使用用途は3つのRTK移動局の座標を基準局側へ送り返した時に受信をします。
送信専用の基準局の横に設置します。

このユニットで使用している基板はRTK移動局でも使っています。
RTK移動局は基準局からの補正データの受信専用チャンネルと移動局座標送信チャンネルの2のアンテナがあります。
ダイバーシティではありません。

使用方法はこんな感じです。

思う
久しぶりに釣り道具屋さんへ行ってきました。
リールと竿の安いセットで良いのが無いかと眺めてきました。
市内に海水の湖があるのでハゼやキスが簡単に釣れます。
2020/06/11 920MHz 1チャンネル
920MHzの1チャンネルの受信器です。
ローコストで防水仕様です。

2020/06/13 RTK基準局 2020
耐候性のケースを選定しました。

30HzのZED-F9Rのドキュメントが更新されていました。
ハードウェアの詳細はまだ不明ですが、ピンコンパチで置き換え可能でしょう。
まあ、hinjyaはSpark Funさんが発売してくれないと入手出来ないので半年後になりそうです。
2020/06/15 920MHz 多チャンネル その3
920MHzのモジュールを3個使用した基板です。
モジュール2個はスタックさせています。

基板を起こす時には、同じ基板を別の使用法で使える事を考えます。
また、基板は必ずケースにリジットに固定しなければなりません。

思う
hinjyaはNHKのドキュメンタリー番組を見るのが好きです。
昨夜の番組の中で山奥に住むネパールの小学生の女の子に「日本は猿の国」と言われてしましました。
その子は日本で働く両親と一緒に住む事を拒否して祖国に帰ってしまいました。
悲しいお話です。
2020/06/16 920MHz 多チャンネル その4
それぞれ10Hzで3つのチャンネルから受信しています。
1mの近距離なのでアンテナが無くても受信しています。
2020/06/17 安いPICで魚釣り その9
すったもんだして、こうなりました。
基板とケースです。
DC/DCコンバータを載せています。
赤丸のボスを削っています。

